Custom BLDC-Controller
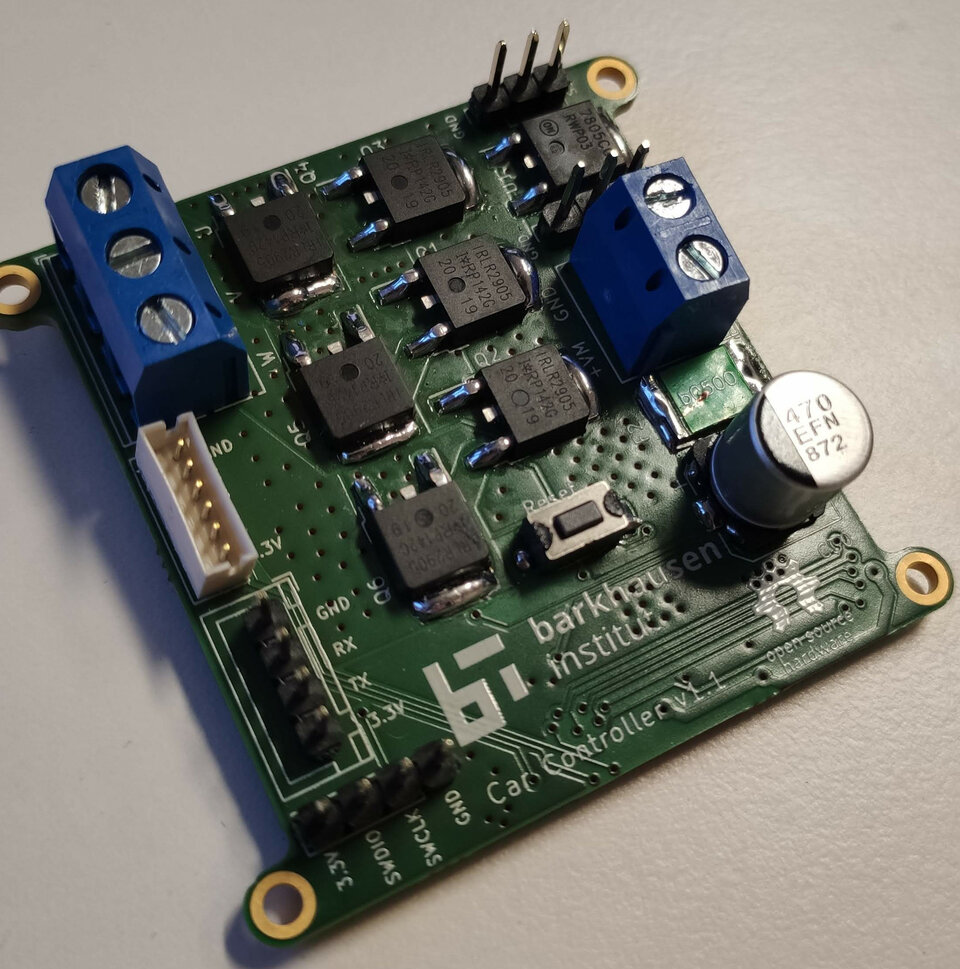
The team of our Connected Robotics Lab built their own BLDC-Controller with all the features they needed for their specific use case.
For our platooning demonstrator small hobby RC cars are used as the basis for the model cars. Over the time the team needed more features than the standard Electronic Speed Controller (ESC) offered. After an unsatisfactory interim solution, the team decided to roll their own ESC/motor controller with all the features they needed for their application.
In their latest CoRoLa-Blog-post they describe their approach and experiences.