Connected Cars - Convoy
The Internet of Things is not only present in static setups such as Smart Factories or Smart Homes. Instead, autonomous driving is as well a driving force for the development of dependable IoT technologies. Our upcoming BI demonstrator will examine the specific aspect of vehicles driving in a platoon. This means, that vehicles drive behind each other with a short and constant distance. This way, e.g. only the first vehicle needs to know the way and can lead the others. Moreover, by keeping a small distance, fuel can be saved by suffering from aerodynamic drag.
In terms of research, diverse technologies to control such a platoon, which also involve communication between the vehicles and road infrastructure have been published. The present demonstrator will evaluate, if these concepts work in reality.
In addition, we plan to implement an interactive mode, where visitors can control the cars manually to experience how difficult the problem of platooning actually is.
First Steps
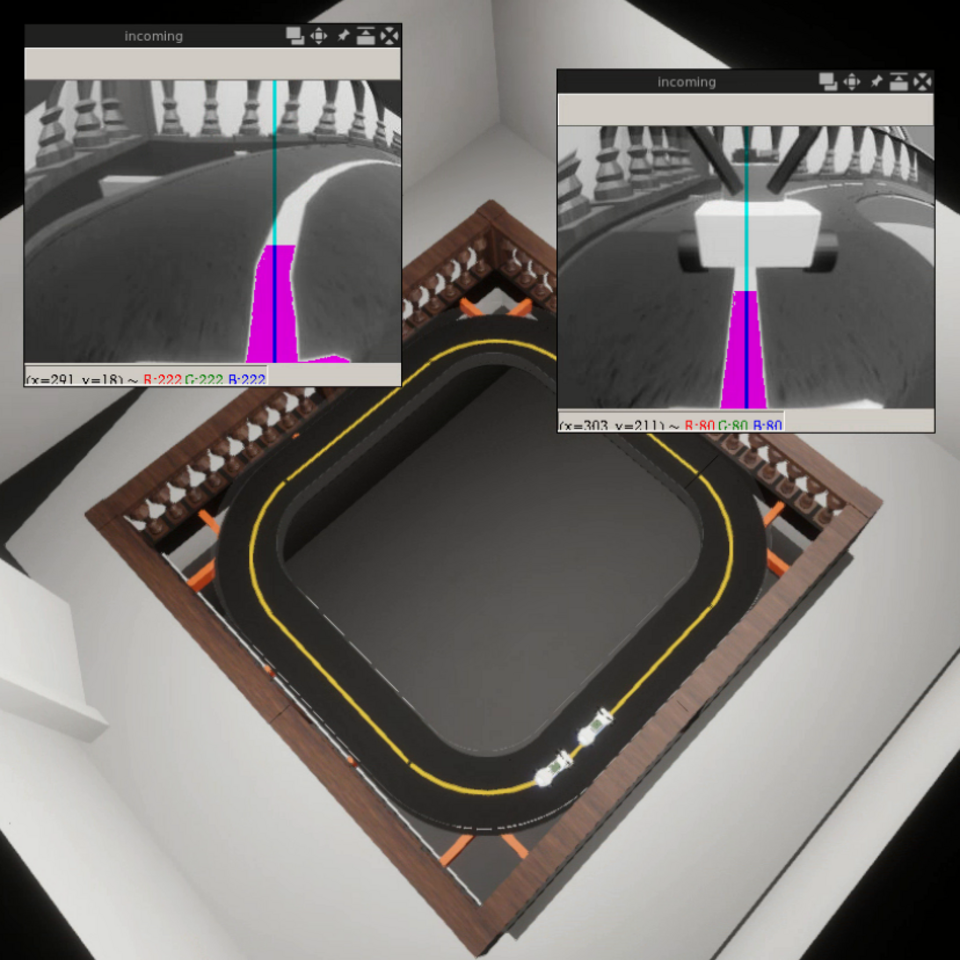

Towards Realisation


It works!