Roboter-Airhockey mit kurzer Reaktionszeit
5G-Mobilfunk wird maßgeblich zur Digitalisierung industrieller Produktion (Industrie 4.0) beitragen. Zum Beispiel werden Mobile Roboter gemeinsam Werkstücke nach individuellen Wünschen fertigen. Wesentlich dabei ist die Verwendung von Sensorik am Einsatzort, vereinter Signalverarbeitung und Fernsteuerung der Roboter. Die Kommunikation zwischen allen Komponenten verläuft drahtlos, um die Mobilität der Roboter zu gewährleisten. Die zwangsläufig auftretende Zeitverzögerung (Latenz) bei der drahtlosen Datenübertragung erschwert eine genaue und flüssige Bewegung. Daher müssen künftige drahtlose Übertragungsverfahren eine sehr niedrige Latenz (etwa 1 ms) aufweisen.
Am Barkhausen Institut haben wir einen Demonstrator entwickelt, welcher direkt den Einfluss hoher Latenz für zeitkritische Anwendungen darstellt. Dazu haben wir einen Airhockey Tisch modifiziert, so dass einer von zwei Spielern durch einen drahtlos ferngesteuerten Roboter ersetzt wird. Die Besucher können die in der drahtlosen Übertragung auftretende Verzögerung einstellen und sehen sofort, wie sich die Genauigkeit und Geschwindigkeit des Roboters verschlechtert. Im 3G Modus, in dem der Roboter eine Reaktionszeit von 150ms hat, kann der Roboter den Puck nicht genau treffen und das Spiel ist leicht zu gewinnen. Im 5G Modus dagegen, mit 1ms Reaktionszeit, bewegt sich der Roboter sehr präzise und es ist schwierig ihn zu schlagen. Ihr seid eingeladen uns zu besuchen und euch selbst mit dem Roboter zu messen.

Schlüsselkomponenten des Demonstrators
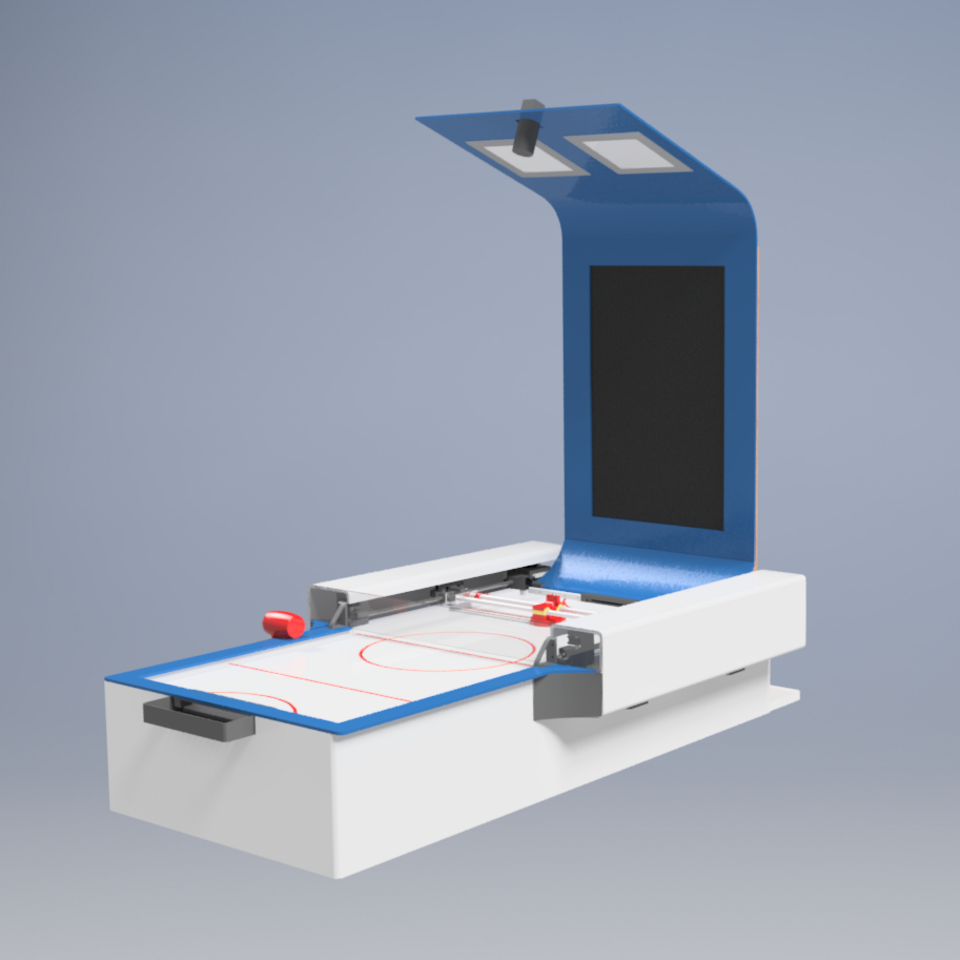
I - Die mechanische Konstruktion und das Gehäuse
Die mechanische Konstruktion wurde am PC designt, bevor wir sie im Labor aufgebaut haben.
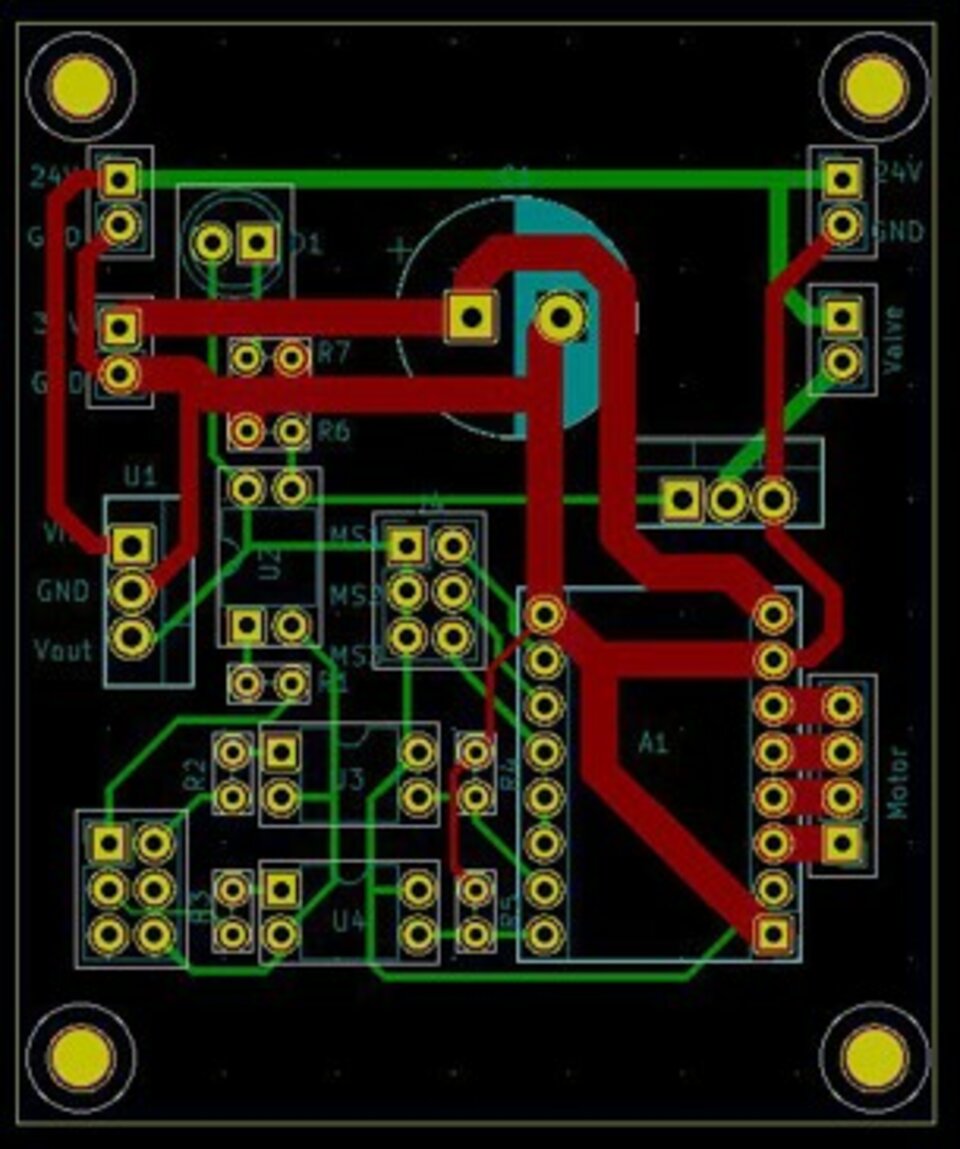
II - Elektrische Komponenten
Die elektrischen Komponenten wie Motortreiber, Sensorik und Microcontroller wurden zunächst am Computer designt, bevor wir sie aufgebaut und getestet haben.

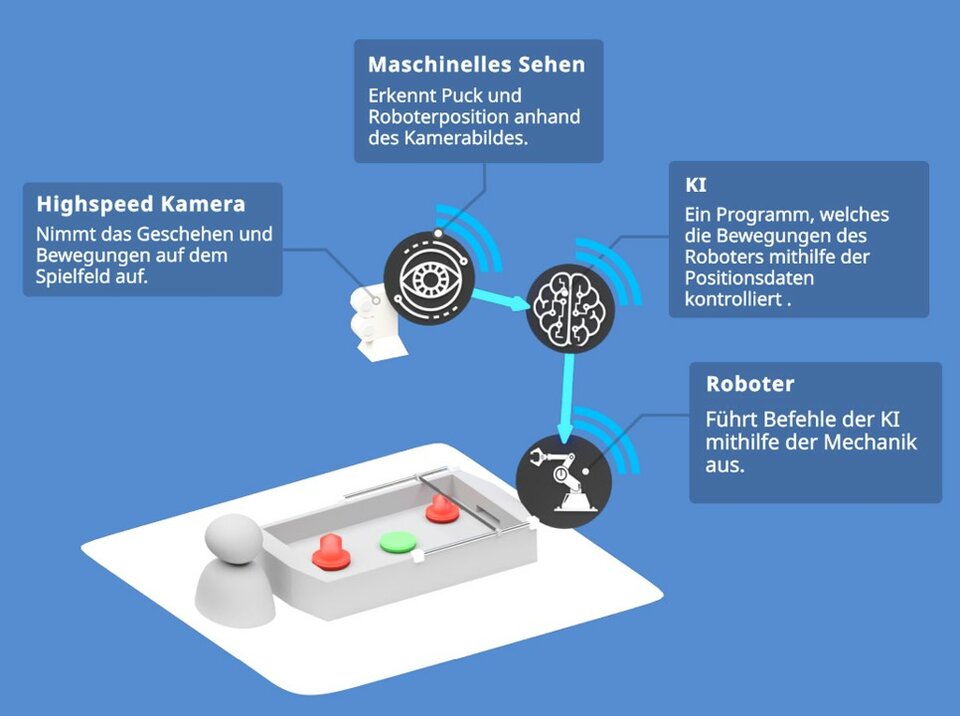
III - Kamera und Bildverarbeitung
Um schelle Antwortzeiten zu garantieren, verwenden wir eine Kamera welche 200 Bilder pro Sekunde aufnimmt. Jedes aufgenommene Bild wird untersucht um die Position von Puck und Roboter zu berechnen.
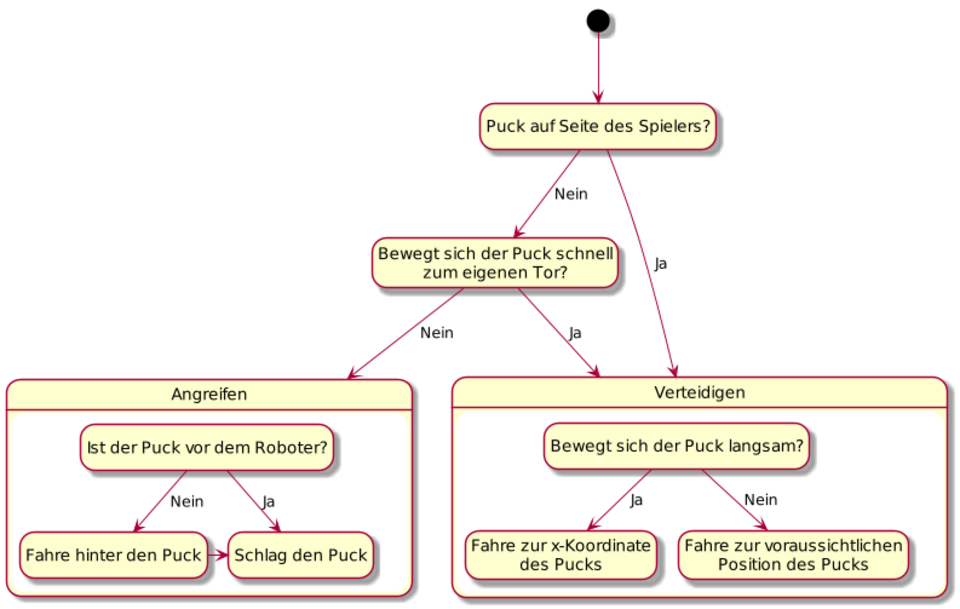
IV - Intelligenz des Roboters
In der ersten Version war die Bewegung des Roboters als deterministischer Zustandsautomat umgesetzt. Kurz gesagt, bildet dieser Automat den Spielzustand (Puck- und Roboterposition) auf eine gewünschte Bewegung ab. Die Berechnung erfolgt durch eine definierte Abfolge von Fallunterscheidungen. Zum Beispiel gehen Kriterien wie schnell sich der Puck bewegt, oder ob der Puck in der eigenen oder fremden Hälfte ist in die Entscheidungsfindung ein.
V - Niedriglatenter Mobilfunk
Die Befehle zwischen PC und Roboter werden drahtlos übertragen. Unsere drahtlose Verbindung verwendet eine 5G-artige Implementierung, basierend auf einer GFDM-Wellenform in der physikalischen Übertragungsschicht. Die Verbindung unterstützt mehrere Nutzer und erreicht Ende-zu-Ende Latenzen von unter 1ms. Die Signalverarbeitung wird in Echtzeit auf einem FPGA in einem National Instruments USRP 2974 berechnet.
Weiterentwicklung
Zurzeit untersuchen wir Möglichkeiten, maschinelles Lernen auf das Problem der optimalen Bewegung des Roboters anzuwenden. Unser Ansatz sieht ein neuronales Netz vor, welches durch bestärkendes Lernen trainiert wird. Derzeit wird der Ansatz durch einen unserer Studenten evaluiert.